
Question 1 (15 marks)
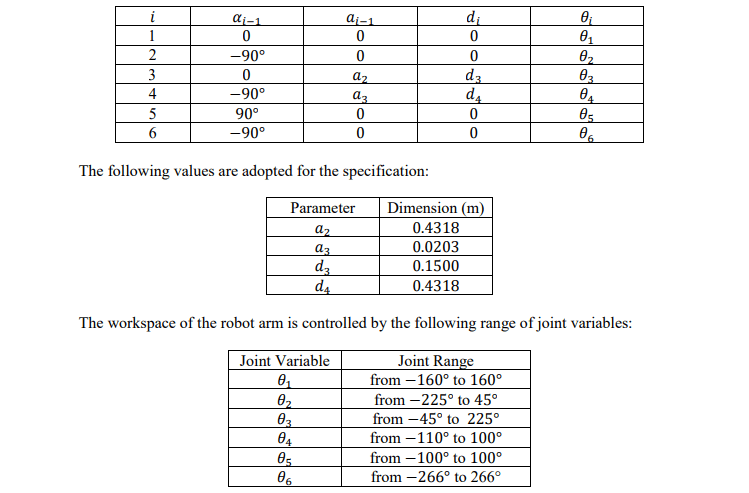
Design a PYTHON program to compute the forward kinematics of PUMA 560. The DH parameters are listed in the following table:
Requirements:
- The code should be able to take the joint variables and the pose (position and
orientation) of a position vector expressed in Frame {6} (i.e., 6𝑃𝑃) as inputs, compute the forward kinematics mechanism, and output the pose of the position vector expressed in frame {0}. - Experiment the code by using the following input values:
[𝜃𝜃1, 𝜃𝜃2, 𝜃𝜃3, 𝜃𝜃4, 𝜃𝜃5, 𝜃𝜃6] = [0, −20°, −30°, 45°, 15°, 30°] and 6𝑃𝑃 = [0.2, 0.2, 0.2]𝑇𝑇. - List the code in the submission and provide the source code (.py) as an accompanying submission.
Question 2 (25 marks)
(a) Inverse kinematics is essential to design a controller of robotic system. Perform numerical calculation for inverse kinematics of the planner three-link manipulator whose algebraic solution procedure is given in Textbook Section 4.4. Figure Q2 shows the mechanism of the three-link planar manipulator and its link parameters. In the figure, the base frame {𝐵𝐵} is shown as Frame {0}, and the wrist frame {𝑊𝑊} is shown as Frame {3}. The following fixed-length parameters are given: 𝐿𝐿1 = 1 𝑚𝑚, 𝐿𝐿2 = 1 𝑚𝑚, and 𝐿𝐿3 = 1 𝑚𝑚. The homogeneous transformation of the wrist frame relative to the base frame (𝑊𝑊𝑇𝑇𝐵𝐵 ) is given by
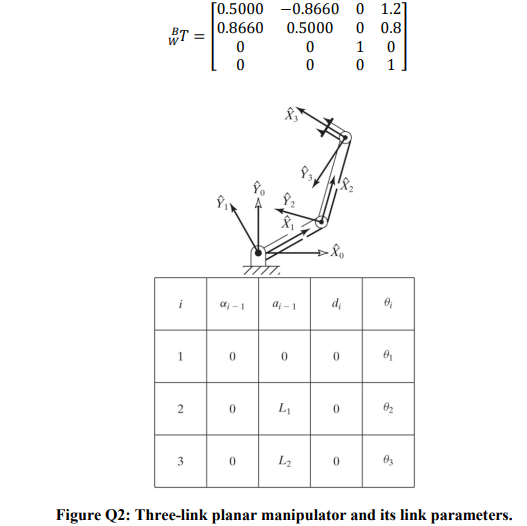
(i) Interpret the geometrical meanings in the following matrix and vector that are equipped numerical entities.
�
0.5000 −0.8660 0
0.8660 0.5000 0
0 0 1
�
and
{1.2
0.8
0}
(ii) Present a pseudocode in Python or Matlab style to show the procedure to calculate joint variables 𝜃𝜃1, 𝜃𝜃2 and 𝜃𝜃3. You are welcome to develop a true code to calculate the number values.
(iii) Solutions for 𝜃𝜃1, 𝜃𝜃2 and 𝜃𝜃3 can be obtained from the given numerical entities in 𝑊𝑊𝑇𝑇𝐵𝐵 . However, another set of numerical entities in 𝑊𝑊𝑇𝑇𝐵𝐵 might not yield solutions from the calculation. Explain your understanding on the non-solution issue.
(b) The inverse kinematics analysis is sometimes not straight forward as that in a forward kinematics analysis. There is no general approach that can be applied to different manipulator mechanism. The solution procedure in Textbook 4.7 for the PUMA 560 example demonstrates several patterns or manipulations that may inspire a solution procedure for another mechanism. Summarize what you have learnt from the example for an inverse kinematics analysis. You may use bullet points with text less than 400 words and only necessary equations.